 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinMeasuring the Grid Impacts of Dynamic Wireless EV Charging
University of Texas at El Paso researchers have developed a model to test the power demand of road-integrated EV charging.
One of the biggest challenges facing widespread electric vehicle adoption is the availability of infrastructure, which encompasses charging availability, reliability, and speed. Some EV developers are turning to dynamic wireless power transfer (DWPT) networks as a solution. While this technology holds promise for solving infrastructure-related roadblocks for EVs, DWPTs also present their unique challenges.
Watch a live demo of DWPT with a model. Video used courtesy of KarthikProjects
Researchers from the University of Texas at El Paso (UTEP) have created a computationally efficient method to model power demand in large-scale DWPT networks. The research could address many problems facing DWPT deployment.

Concept of DWPT. Image used courtesy of National Renewable Energy Laboratory
Grid Impact of Wireless Charging Networks
DWPT is a technology that enables electric vehicles to charge while in motion. It uses inductive or capacitive coupling between transmitter pads embedded in roadways and receiver pads mounted on vehicles.
Whereas conventional plug-in or fast-charging stations require vehicles to stop and connect to a power source, DWPT eliminates downtime by charging EVs while they drive. Therefore, this technology addresses one of the biggest barriers to EV adoption—range anxiety—by extending vehicle range without increasing battery capacity. Since battery size directly impacts vehicle cost, weight, and efficiency, reducing reliance on large battery packs will then improve overall vehicle economics and sustainability.
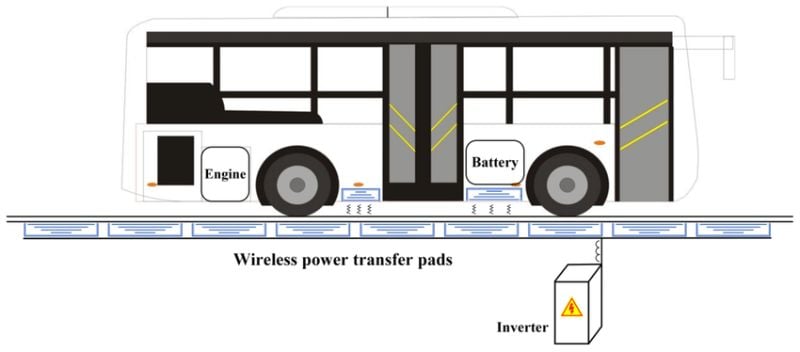
DWPT for a public bus. Image used courtesy of Chen et al.
DWPT also presents major benefits for urban electrification by reducing peak charging loads on the grid. In cities where large fleets of electric taxis, buses, and delivery vehicles require frequent charging, DWPT-enabled roads can distribute charging demand over time rather than concentrating it at specific locations. Such a decentralized approach to charging can improve grid flexibility, reduce congestion at charging stations, and support scalable EV adoption without excessive strain on existing infrastructure.
However, large-scale DWPT deployment introduces new challenges for grid integration, particularly in terms of dynamic load balancing and infrastructure upgrades. Unlike stationary chargers that contribute predictable loads, DWPT networks generate distributed and mobile power demand that varies with traffic density and vehicle velocity. For example, a 10-mile stretch of DWPT roadway at 25% EV penetration could create a continuous 10-15 MW load. Additionally, the high-frequency (85 kHz) power transfer used in DWPT introduces potential harmonic distortions that impact grid stability and require advanced power factor correction strategies.
UTEP Research
The UTEP team focused on load demand modeling for large-scale DWPT networks.
The team primarily addressed the computational burden and accuracy limitations of modeling power demand in large DWPT networks, where high traffic flow and numerous transmitter pads make conventional simulation methods inefficient. Existing approaches, such as power electronics-based modeling, struggle with scalability due to excessive computational requirements.
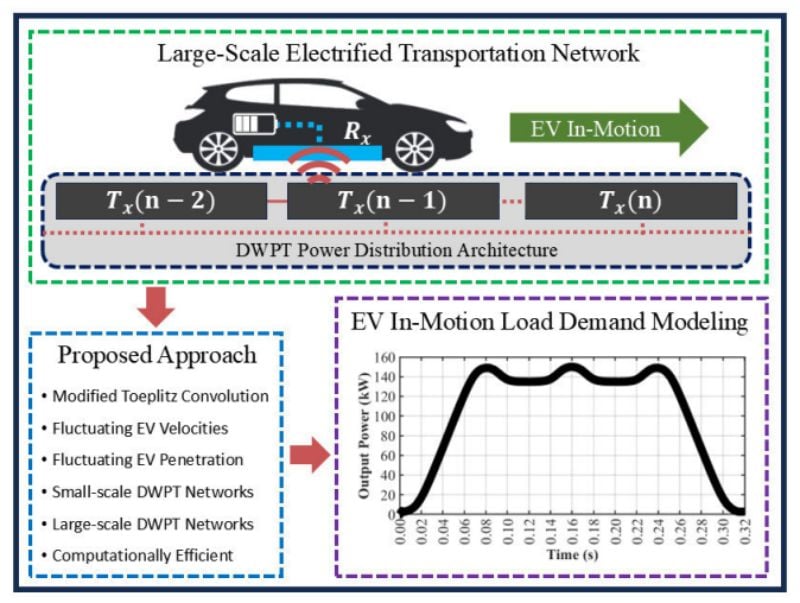
The research team’s proposed approach for DWPT network load demand modeling. Image used courtesy of Newbolt et al.
To overcome these limitations, the researchers proposed a modified Toeplitz convolution (mCONV) method for large-scale DWPT load demand modeling. This method models power demand by representing the interaction between transmitter and receiver pads as a discrete convolution process that accounts for pad overlap, vehicle velocity variations, and fluctuating traffic conditions. Unlike prior methods that assume constant power transfer or rely on computationally expensive electromagnetic simulations, the mCONV approach achieves a more accurate representation of real-world DWPT load demand profiles while maintaining low computational intensity.
A small-scale DWPT simulation performed validation using an 85 kHz inductive charging system with a dual-LCCL compensation topology. The mCONV method achieved a mean absolute error of 2.2 kW, corresponding to just a 1.49% deviation from a 150 kW-rated DWPT system. Additionally, it showed a 93.67% improvement in Euclidean similarity over previous integrative methods. The mCONV’s computational efficiency was further demonstrated by reducing simulation time to 59.61 seconds, compared to 26,880 seconds (7.5 hours) for Ansys/Plecs-based models.
The method for large-scale DWPT systems was tested using real-world traffic data across 2- —to 10-mile roadway segments. The mCONV model produced accurate load demand profiles with significantly reduced computational intensity compared to INTG-based simulations.
Future Considerations
As electric vehicle adoption continues, the infrastructure supporting them must evolve to meet demand while minimizing grid strain. DWPT presents a compelling solution by enabling in-motion charging, yet its large-scale deployment requires careful planning to ensure grid stability, cost-effectiveness, and scalability. By improving efficiency in large-scale simulations, the UTEP team has laid the groundwork for real-world implementation and optimization of wireless charging networks. As research progresses, pilot deployments of DWPT roadways will determine the feasibility of large-scale adoption.











