Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinGaN Motor Drive Inverter Advances in UAV Drones for Ag Apps
Modern agricultural techniques have been revolutionized by the integration of unmanned aerial vehicle drones, which are low-voltage battery-operated aircraft. Smaller drones are utilized for terrain mapping and vegetation monitoring, while heavier, more robust variants are employed for tasks such as spraying and distributing fertilizers and insecticides, as well as disseminating seeds and feed with payloads up to 50 kg loads.
This article is published by EE Power as part of an exclusive digital content partnership with Bodo’s Power Systems.
Modern agricultural techniques have been revolutionized by the integration of unmanned aerial vehicle (UAV) drones, which are low-voltage battery-operated aircraft. Smaller drones are utilized for terrain mapping and vegetation monitoring, while heavier, more robust variants are employed for tasks like spraying and distributing fertilizers and insecticides, as well as disseminating seeds and feed with payloads up to 50 kg loads.
The reduced RDS(on) and capacitance per die area of GaN devices compared to silicon MOSFETs allow for the design of smaller and lighter inverters. Furthermore, the superior switching and thermal performance of GaN devices enable the increase of PWM frequency while maintaining low-temperature rise, resulting in minimal to no efficiency loss in the inverter.
A higher switching PWM frequency benefits the motor for at least two reasons: the sweet spot of today’s BLDC motors’ impedance is at a higher frequency than the typical MOSFET inverter application (ranging from 10 kHz to 40 kHz) due to their small electrical constants. Consequently, operating the inverter at a higher PWM frequency improves the motor’s efficiency. Beyond motor considerations, a higher PWM frequency allows a reduction in the size of the DC link filter, particularly when using ceramic capacitors, resulting in a smaller and lighter inverter.
MOSFET Trapezoidal Control vs. GaN FET Sinusoidal Control
Trapezoidal modulation control is a technique used to drive three-phase BLDC motors, where the phase current has a trapezoidal shape; during each commutation phase, only two of the three phases are energized, hence only two of the three inverter’s legs are switching. This technique effectively reduces switching losses, especially in silicon-MOSFET-based motor drive inverters with high phase current and high motor power. However, the drawback of this technique is the large voltage ripple on the DC bus, which may cause EMI issues and reduced motor efficiency due to the high harmonic content of the trapezoidal-shaped current waveforms.
Alternatively, sinusoidal current modulation control requires a higher number of switching commutations and inverters with low switching losses. The resultant excitation exhibits lower harmonic content compared to trapezoidal excitation, consequently leading to higher mechanical efficiency of the motor. GaN FET-based inverters have low switching losses even at high PWM frequencies, with sinusoidal modulation, and at higher currents.
In an experimental evaluation, a motor originally equipped with a trapezoidal-modulated inverter was tested against a sinusoidal-modulated GaN FET inverter. The MOSFET inverter was equipped with six 100 V-rated 1.2 mΩ typical ON-resistance silicon MOSFETs, and it used two large electrolytic capacitors (470 µF, 63V), that occupied nearly half the volume of the overall inverter. In contrast, the GaN FET inverter EPC9194 was equipped with six 100 V rated 1.4 mΩ typical ON-resistance GaN FETs, using 9 x 10 µF DC link ceramic capacitors, occupying a volume roughly 30 times smaller than that of the electrolytic capacitors of the MOSFET inverter. Despite having a similar typical ON resistance, the capacitances of the GaN FETs are considerably lower than those of the MOSFETs, allowing the GaN-based inverter to be operated at higher PWM frequencies.

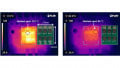
Figure 1. Lab test setup, showing the EPC9193 inverter board connected to the UAV agricultural drone motor and the oscilloscope probes used for measuring the waveforms. Image used courtesy of Bodo’s Power Systems [PDF]
Figure 1 shows the test setup, where a current probe and a voltage probe were employed to measure the DC bus current and voltage. The oscilloscope’s math trace was used for calculating the DC bus input power. In addition to the input power measurements, the phase voltage was measured to check the PWM frequency of the inverter. Furthermore, a current probe was applied to the motor wire connection to examine the shape of the phase current.

Figure 2. Absorbed input DC power as a function of motor speed for the low-frequency PWM trapezoidal MOSFET inverter (red trace) and high-frequency PWM sinusoidal GaN FET inverter (blue trace). Image used courtesy of Bodo’s Power Systems [PDF]
Figure 2 shows the measured input power required by the two inverters as a function of motor speed. The red trace represents the MOSFET inverter, which lies above the blue trace representing the GaN FET, indicating that it requires more electrical power to make the motor run at the same speed. Given that the load torque is determined by the propeller’s shape and speed, and considering that the same motor-propeller system was driven by both the MOSFET and GaN FET inverters, the motor speed solely dictates the output mechanical power.

Figure 3. Extra power consumption in low-frequency PWM trapezoidal MOSFET inverter with respect to high-frequency PWM sinusoidal GaN FET inverter absorbed DC power vs. motor speed. Image used courtesy of Bodo’s Power Systems [PDF]
Next, the input power difference between the MOSFET inverter solution and the GaN FET inverter solution is plotted as a function of motor speed. As shown in Figures 2 and 3, the MOSFET inverter requires more electrical power from the power supply (or the battery, in a real-world application) to deliver the same mechanical power to the load, i.e., the propeller. The largest contributing factor is that the GaN FET inverter with its high-frequency PWM sinusoidal excitation converts DC electrical energy into mechanical energy more efficiently than low-frequency trapezoidal modulation, thanks to the cleaner harmonic content of the sinusoidal excitation.
Figure 2 shows that at a motor speed of 2100 rpm, the GaN FET inverter requires approximately 1750 W, whereas Figure 3 shows that the MOSFET inverter requires an additional 350 W of input power compared to the GaN FET solution. Consequently, the trapezoidal modulated MOSFET inverter needs an additional 20 % of DC power to run the motor at 2100 rpm.
The flight time of UAV agriculture drones depends on the mission profile of the motor speed and the battery technology, but it can be estimated to be a few tens of minutes. Using a GaNFET inverter with high-frequency PWM sinusoidal excitation in a drone application instead of a traditional MOSFET inverter with low-frequency PWM trapezoidal excitation could result in a power reduction of a few hundred Watts per motor, extending the flight time by several minutes.
Low-PWM Frequency MOSFET Sinusoidal Control vs. High-PWM Frequency GaN FET Sinusoidal Control
In a subsequent test, a second motor equipped with a MOSFET inverter with low-frequency sinusoidal PWM modulation was tested against an EPC9193 GaN FET inverter. The original MOSFET inverter switches at 16 kHz with sinusoidal PWM modulation, using 2x FETs in parallel per switch. Each FET is rated at 120 V with a typical on-resistance of 3.6 mΩ, resulting in a total of 12 transistors for the entire inverter. On the other hand, the GaN FET inverter operates at 120 kHz, also with 2x FETs in parallel per switch. Each GaN FET is rated at 100 V with a typical on-resistance of 3.3 mΩ, giving 12 total transistors for the whole inverter.
The first experiment demonstrated that a high-frequency PWM sinusoidal control outperforms the low-frequency PWM trapezoidal control in terms of overall system efficiency. The objective of the second experiment was to confirm that when using sinusoidal modulation, a GaN FET inverter switching at high frequency still outperforms a low-frequency MOSFET inverter in terms of efficiency.

Figure 4. Extra power consumption between a low-frequency sinusoidal PWM modulated MOSFET inverter compared to a high-frequency sinusoidal PWM modulated GaN FET inverter vs. motor speed. Image used courtesy of Bodo’s Power Systems [PDF]
Figure 4 illustrates the input power difference between the MOSFET inverter solution and the GaN FET inverter solution as a function of motor speed. In the lower speed range (below 1500 rpm), which is the power range of the startup sequence for a sensorless control algorithm, the extra power required by the MOSFET inverter is small. However, in the higher power range of the graph (above 1500 rpm), the surplus power required by the MOSFET inverter increases significantly. Typically, the drone’s motor operates within the lower power range solely during the start-up sequence, lasting a few tens or hundreds of milliseconds. Conversely, the power level at which the motor operates during normal flight occurs in the higher power range of the graph, where the extra power required by the MOSFET inverter is higher and increases with the motor speed.
Agricultural drones come equipped as either hex-copters (6 motors, 6 propellers) or octa-copters (8 motors, 8 propellers) using motors like those tested. Therefore, saving several tens of watts on each motor translates to saving up to a few hundred watts on the overall drone system. It is difficult to precisely determine the flight time of a drone without knowing its mission profile, however assuming flight autonomy of a few tens of minutes, saving a few hundred watts overall can extend the flight time of the drone by several tens of seconds to a few minutes.
Takeaways of GaN-Based UAVs
The benefits of GaN power devices in three-phase motor drive inverter applications extend to agricultural drone UAVs, and their performance was verified with lab experiments.
GaN-based inverters prove to be suitable for UAV agricultural drones since they extend the battery life by improving motor efficiency, courtesy of the higher PWM frequency with sinusoidal excitation. In addition to the efficiency considerations, the higher PWM frequency contributes to a reduction in the dimensions of the DC link, thereby reducing the size and weight of the inverter, which is vital in lightweight aircraft.
This article originally appeared in Bodo’s Power Systems [PDF] magazine.