Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinMotor Emulator Applications
Motor emulation plays an essential role in multilevel inverter-based applications to validate the use in high power applications. Read on to learn more about the different implementations of motor emulators.
Motors are used in a wide range of industrial applications, from heat pumps and compressors to conveyor belts and traction [1]. Similarly, motor emulators can be employed for a wide range of applications. One such application is its effective use for fault modes and effects analysis (FMEA). The FMEA based approach can help the fault site, fault mechanism, and preventive methods for a particular application.
Emulators are proven effective in virtual environments as there is less need for actual testing equipment [2]. This enables the study of failure modes and analysis of the same for critical modes.
Implementation of Different Types of Motor Emulators
The use of surface-mount permanent magnet synchronous motor (SPMSM) is preferred over the interior permanent magnet synchronous motor (IPMSM), which suffers from a large torque ripple. Starting IPMSM is difficult due to the reluctance torque and thus is used as a load, while SPMSM serves as an emulator [3]. This emulator comprises a power circuit with a three-phase inverter board arrangement followed by PI controllers for current and voltage references. A DSP-based controller controls the interior permanent magnet synchronous generator (IPMSG) using the maximum power point tracking (MPPT) mechanism.
The implementation mentioned above is effective but suffers from the high operating cost. To reduce the cost of operation and minimize the risk of operation at the actual power level, a permanent magnet synchronous motor (PMSM) is emulated in a power hardware-in-the-loop (PHIL) atmosphere [4]. In this implementation, the actual load sets the line currents, and the PHIL emulates the machine terminal voltage. Also, the parasitic capacitance values are considered into system performance characteristics. The system is swept under parasitic capacitance values, and the simulation step time determines the stable region of operation.
The PHIL-based motor drive control has been studied extensively in the past. One of the key adoptions is the transformer-based coupling mechanism for the induction motor drive [5]. The purpose of incorporating a transformer is to provide galvanic isolation between the amplifier stage and the converter stage. It also provides other advantages like low ripple current and the ability to use a low voltage platform for verification stages. The implemented motor emulator platform has the advantage of having no rotating components and utilizes the load emulator processed through a real-time digital simulator (RTDS). The RTDS also provides a graphical user interface-based solution for changing values in the component parameters and visualizing real-time results.
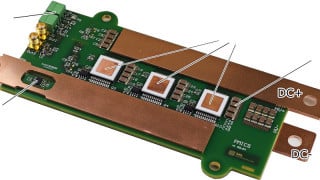
There is another implementation of motor emulator accomplished using surface mount type PMSM in an e-mode type virtual setup employed to test an inverter [6]. A sample implementation is shown in Figure 1 [7]. The absence of a mechanical setup is a significant advantage of a virtual setup. Several fault modes can be injected into the inverter motor setup to test the system performance. The motor characteristics can be analyzed in case of inverter failure, and the inverter characteristics can be analyzed in the event of the motor or the resolver failure. This also helps in the trade-off analysis for selecting the right components for the application at hand.

Figure 1. Illustration of e-motor emulator to test an inverter. Image courtesy of AVL
A unique implementation of the motor emulator is using surface mount PMSM for niche applications such as wave energy converters [8]. The crucial aspect in such a case is the control algorithm that handles a wide range of values ranging from maximum to minimum variation in the voltage, current, speed, and torque values. The setup can be used to validate nonlinear control algorithms by using the whole system formed by the interconnection of three sub-systems. This particular implementation helps identify the system performance under different control conditions and guides in validating a suitable converter that can take care of all the effects.
Key references:
- Control Engineering | How to select a motor for an industrial application.
- Oceguera et. al., Real-Time Step Motor Emulator for Hardware-in-the-Loop Simulation, 2010.
- Chen et. al, Development of a prime mover emulator using a permanent magnet synchronous motor drive, 2018.
- Kaarthik et. al., Emulation of a permanent magnet synchronous generator in real-time using power hardware-in-the-loop, 2018.
- Vodyakho et. al., An induction machine emulator for high-power applications utilizing advanced simulation tools with graphical user interfaces, 2012.
- Bin et. al., Fault injection test for mcu based on e-motor emulator, 2019.
- How to use an e-motor emulator to test an inverter
- Ramirez et. al., Non-linear vector current source for the control of permanent magnet synchronous generators in wave energy applications, 2019.
Related Content