 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinReliability Features of Power Electronics as an SOA Component in Automotive
The article outlines how digital twins, predictive control, neural networks and Power-HIL turn power electronics into active SOA components, adding reliability and lifetime benefits to sustainable automotive systems.
This article is published by EEPower as part of an exclusive digital content partnership with Bodo’s Power Systems.
Article co-authored by Chris Hermann, Diego Kuderna Melgar, Valentyna Afanasenko, Dominik Koch, Ingmar Kallfass—all of Institute of Robust Power Semiconductor Systems, University of Stuttgart, Germany
The shift towards electromobility and service-oriented architectures (SOA) in the automotive industry is leading to a redefinition of the role of power electronics (PE). Modern trends demand that PE components offer not only high performance, but also the ability to adapt, interact with other subsystems, and provide information about their own condition.
Image used courtesy of Adobe Stock
If in the past the drivetrain inverter was perceived as a “black box” with fixed logic and a limited lifetime, it now has to become a “digital participant” of the vehicle’s service-oriented architecture. Such a component must be able to evaluate its current state, predict degradation, adapt its behavior, and integrate into broader systems, including predictive maintenance, route planning, and centralized traffic management (Figure 1).
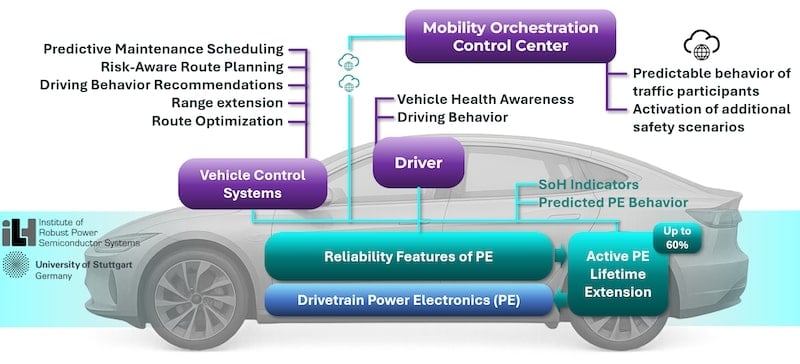
Figure 1. Contribution of Power Electronics Reliability Features to SOA-Based Vehicle Systems. Image used courtesy of Bodo’s Power Systems [PDF]
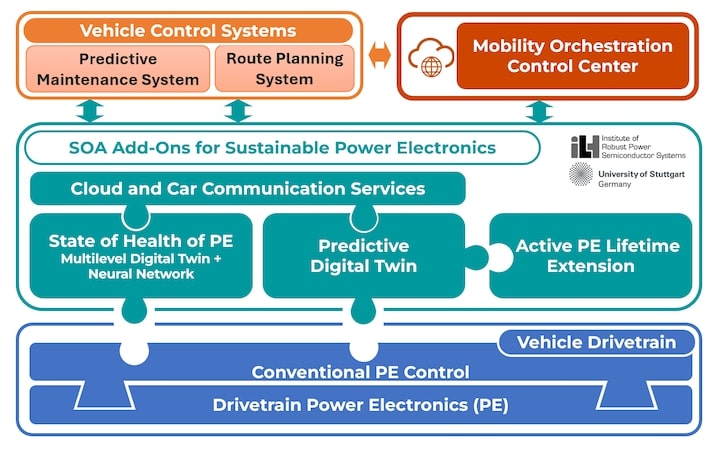
Figure 2. SOA add-on for the drive train inverter of the EV. Image used courtesy of Bodo’s Power Systems [PDF]
The Institute of Robust Power Semiconductor Systems (ILH), University of Stuttgart, developed and validated a concept for integrating the drive train inverter power electronics into the SOA structure of a vehicle by applying predictive control, digital twins, neural networks, and Power-Hardware-in-the-Loop (Power-HIL). This concept enables a transition from reactive maintenance to proactive resource management of power modules and provides a foundation for the sustainable and safe operation of electric vehicles (Figure 2).
Multi-level SOA Architecture with Power Electronics Integration
The integration of power electronics into the service-oriented vehicle architecture is implemented through a multi-level structure of digital services, where each level performs a specific role and interacts with the others according to SOA principles.
1. Drivetrain Power Electronics
At the foundation of the system are the drivetrain inverters based on modern SiC MOSFETs. These are physical devices that act as efficient power switches to provide switched-mode energy conversion and motor control and are directly exposed to thermal and electrical stress.
2. Conventional Control of Power Electronics
The traditional inverter control system is responsible for delivering the target currents, voltages, and frequencies required for motor operation in response to the driver or system commands. It functions independently of reliability and degradation forecasting tasks.
3. State-of-Health Estimation of Power Electronics Based on a Multi-level Digital Twin and Deep Neural Network
At this level, the behavior of the power electronics is predicted using a digital model of the inverter combined with a neural network estimation of the remaining useful life. The digital twin reconstructs parameters of the inverter that are not directly measurable and includes a built-in aging model. The data comprise electrical, thermal, and control parameters, power losses, as well as degradation- and temperature-sensitive electrical characteristics (DTSEPs). The output of this layer is the estimation of State-of-Health (SoH) and Remaining Useful Life (RUL), provided as a digital service.
4. Predictive Control for Extending Power Electronics Lifetime and Efficient Route Planning
Using the predictive digital twin, the behavior of the power electronics is calculated within a given predictive horizon. Based on this vector of predictive values, an optimal control trajectory is generated to extend the lifetime of the power electronics.
In both cases, a degradation factor is calculated to indicate the effectiveness of the approach.
An important feature of active lifetime extension is that the processes are implemented at the driver level of the power semiconductor devices and do not interfere with the main motor control, which fully complies with the SOA concept.
5. Vehicle Control Systems
The obtained state estimations and predictions of the power electronics can support enhancements and enable optimization of vehicle-level functions such as:
- Predictive Maintenance
- Range extension
- Risk-Aware Route Planning
- Driver Behavior Recommendations
6. Traffic Orchestration Layer
At the top level, a global orchestrator coordinates the behavior of the vehicles, exchanges data via V2X, and takes into account the predicted condition of components in each vehicle. This enables route planning with reliability awareness, activation of adaptive safety scenarios, and improved predictability of traffic participants.
Each layer implements its own logic and interacts with others through standardized digital interfaces. Such a modular architecture allows power electronics to be integrated as an active SOA component, providing not only energy conversion functions but also a digital service for state estimation, lifetime prediction, and reliability management.
State-of-Health Estimation of Drivetrain Power Electronics
A key factor for the reliable and safe operation of drivetrain power electronics is the ability to objectively assess its current condition. In the proposed architecture, this is achieved through the SoH module, which provides a digital service for evaluating the remaining lifetime and degradation risk of the power module.
The SoH module assessment mechanism is based on two complementary technological components:
• Multi-level digital twin of the power electronics, covering:
- System level for electrical, thermal, and control processes,
- Semiconductor module level for thermal and loss models of the power module,
- Semiconductor chip level for temperature-sensitive electrical parameters and an aging model.
This digital twin enables real-time evaluation of the dynamic behavior of the power electronics, including parameters not directly measurable in practice.
• Deep neural network, trained on data collected in a PowerHardware-in-the-Loop (Power-HIL) setup, where real drivetrain inverter operating conditions were reproduced. The neural network uses TSEPs to evaluate both SoH and RUL.
The SoH module estimation becomes a digital service, delivering additional value at different levels:
• For the driver — providing information about the overall condition of the power electronics and recommendations on driving behavior (Vehicle Health Awareness).
• For vehicle control systems — SoH module data may be integrated into:
- Predictive Maintenance Scheduling,
- Route selection considering expected component degradation (Risk-Aware Route Planning),
- Adaptation of drivetrain control strategies under limited resources (Driving Behavior Optimization)
• For the centralized traffic orchestrator — SoH module information enables:
- Predictable behavior of traffic participants,
- Activation of additional safety scenarios.
In this way, the SoH module transforms power electronics from a passive element into an intelligent participant of the vehicle’s digital ecosystem, providing real-time data to enhance the reliability and resilience of the entire system.
Behavior Prediction of Drivetrain Power Electronics
Based on the predictive driving horizon (speed, traction force, route profile, etc.), which is already available in advanced vehicle control systems, the digital twin calculates the electrical parameters of the power electronics: current, voltage, frequency, and derives losses and the junction temperature of the semiconductors from them.
The junction temperature is a key parameter for the reliability of semiconductor components. Using its predicted trajectory, a dedicated algorithm evaluates how quickly the power electronics will degrade under a given predictive scenario.
This information can be used for:
- actively extending the lifetime of semiconductors and power modules,
- integration into vehicle control systems for route optimization, as an additional cost function in route planning. This approach was tested with the ZF EcoControl system, and the results of this evaluation are shown in Figure 3.
Forecasting junction temperature and degradation requires modeling of a complex multi-parameter system with cross-coupled feedback between electrical, thermal, and control variables. The digital twin provides the necessary modeling depth and adaptability, enabling this functional block to be realized as part of a predictive control strategy. Such a digital twin can be implemented on an embedded system with a processor clock of 200+ MHz and at least 2 MB of memory.
Application Example: Active Lifetime Extension System for Semiconductors
One of the main factors of power electronics degradation is thermomechanical stress accumulation caused by sharp fluctuations of the semiconductor junction temperature. Using data from the predictive digital twin and the real-time route planning, the thermal trajectory can be forecast in advance, and a control algorithm can be applied to minimize the amplitude of temperature peaks.
This strategy is implemented at the driver level and adapts the MOSFET gate control parameters without interfering with the main inverter control system. This makes it possible to integrate it as an independent service within the SOA framework.
Such control can extend the lifetime of power electronics by up to 60% compared to conventional operation modes, with only a moderate increase in additional electrical losses.
Experimental Implementation using Power-HIL
To validate the concept, a Power-Hardware-in-the-Loop setup was built using two 50 kW inverters (SiC and IGBT) connected in a back-to-back configuration. The tests were carried out by reproducing driving cycles FTP75, FTP72 for normal driving, US06 for aggressive driving, HWFET for highway driving, and WLTP 3b for a mixed mode drive profile.
This setup made it possible to:
- simulate real driving profiles,
- validate the digital twins by comparing estimated and experimental trajectories,
- obtain realistic data for training the neural network SoH model and testing its performance (Figure 4).
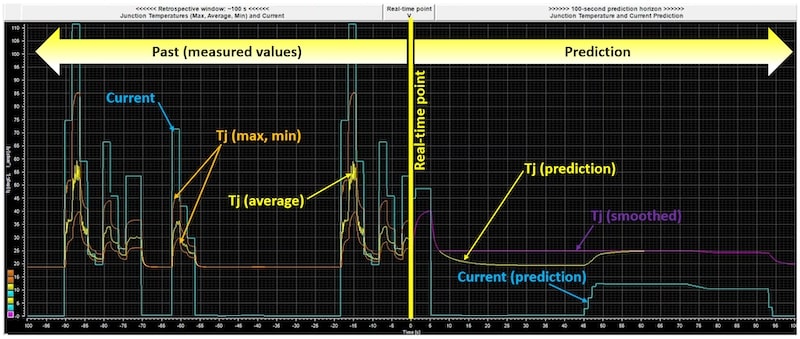
Figure 3. Testing with the ZF EcoControl route planning system via cloud. Image used courtesy of Bodo’s Power Systems [PDF]
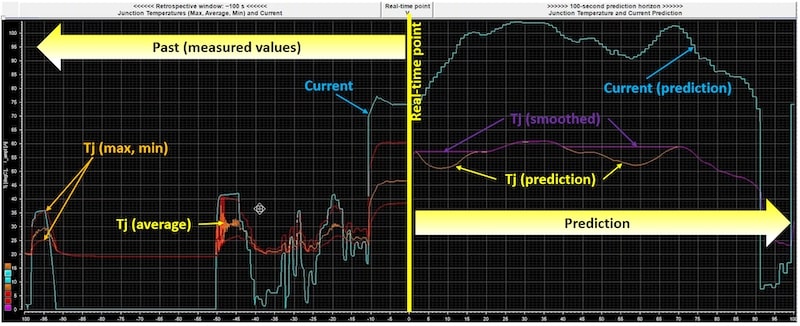
Figure 4. Testing with FTP75 drive cycle data. Image used courtesy of Bodo’s Power Systems [PDF]
Conclusion
The integration of the Reliability Features of the drivetrain power electronics into the vehicle’s digital ecosystem is not just an improvement of individual components, but a transition to a new level of PE integration into the digital domain for sustainable electromobility:
- Power electronics becomes a “speaking” component, providing a digital service.
- Interaction with routing and service systems increases the adaptability of the vehicle.
- Centralized vehicle management gains access to real-time reliability data of components and initiates safety-oriented driving scenarios.
Such a structure meets the challenges of sustainable development: not only reducing energy consumption, but also extending component lifetime, reducing waste, improving maintainability, and minimizing the risk of failures in operation.
Acknowledgement
The authors acknowledge the financial support of the research within the ”AUTOtech.agil - Architecture and Technologies for Orchestrating Automotive Agility” project (FKZ 01IS22088A) by the Federal Ministry of Education and Research of Germany (BMBF).
The implementation and testing were carried out by the team of the Institute of Robust Power Semiconductor Systems of the University of Stuttgart. Special thanks to our colleagues from ZF Friedrichshafen AG and to all partners involved in the AUTOtech.agil project for their support and collaboration.
This article originally appeared in Bodo’s Power Systems [PDF] magazine and is co-authored by Oleksandr Solomakha, Chris Hermann, Diego Kuderna Melgar, Valentyna Afanasenko, Dominik Koch, Ingmar Kallfass, Institute of Robust Power Semiconductor Systems, University of Stuttgart, Germany











