Facebook
Facebook Google
Google GitHub
GitHub Linkedin
LinkedinARM-Based Development Kit for 3-Phase Permanent Magnet Synchronous Motors
The MTRDEVKSPNK144 from NXP Semiconductors is a development kit engineered for 3-phase motor control applications requiring one Permanent Magnet Synchronous Motor (PMSM) motor, such as active suspension or electric powertrain.
Based on the 32-bit Arm® Cortex®-M based S32K1 microcontroller family, the MTRDEVKSPNK144 enables rapid prototyping and evaluation of the motor control application without having to wait for the final hardware design.
The MTRDEVKSPNK144 application software takes advantage of the Automotive Math and Motor Control Library Set and provides a complete reference implementation of the 3-phase PMSM motor control application.
The system is designed to drive a 3-phase PM synchronous motor. The application meets the following performance specifications:
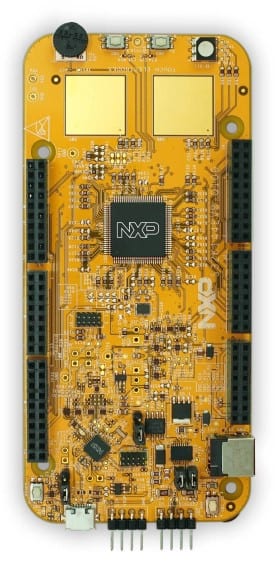 The S32K144EVB is a low-cost evaluation platform and development system for quick application prototyping and demonstration for the S32K144 MCU.
The S32K144EVB is a low-cost evaluation platform and development system for quick application prototyping and demonstration for the S32K144 MCU.
- Targeted at the S32K144EVB Evaluation Board
- S32 Software Development Kit (SDK) and Processor Expert (PEx) used as S32K144 device configuration and control tool being a part of the S32 Design Studio
- MC34GD3000 MOSFETs pre-driver with extensive set of functions and condition monitoring
- Control technique incorporating:
- Field Oriented Control of 3-phase PM synchronous motor without position sensor
- Closed-loop speed control with action period 1ms
- Closed-loop current control with action period 100µs
- Bi-directional rotation
- Flux and torque independent control
- Field weakening control extending speed range of the PMSM beyond the base speed
- Position and speed are estimated by Extended BEMF observer or obtained by Encoder sensor
- Open-loop start up with alignment
- Reconstruction of three-phase motor currents from two shunt resistors
- FOC state variables sampled with 100 μs period
- Automotive Math and Motor Control Library (AMMCLIB) - FOC algorithm built on blocks of precompiled SW library
- FreeMASTER software control interface (motor start/stop, speed setup)
- FreeMASTER software monitor
- FreeMASTER embedded Motor Control Application Tuning (MCAT) tool (motor parameters, current loop, sensorless parameters, speed loop)
- FreeMASTER software MCAT graphical control page (required speed, actual motor speed, start/stop status, dc-bus voltage level, motor current, system status)
- FreeMASTER software speed scope (observes actual and desired speeds, dc-bus voltage and motor current)
- FreeMASTER software high-speed recorder (reconstructed motor currents, vector control algorithm quantities)
- DC-bus over-voltage and under-voltage, over-current, overload and start-up fail protection